Over decades of operation, foreign material accumulates under the spent fuel pool storage racks, creating increased dose rates and operational challenges. This material can be in the form of particulate/sludge like material as well as foreign objects. Foreign material can be disturbed by water motion caused by fuel handling and spent fuel pool filtration. Water disturbance affects pool clarity and visibility, increasing the potential for human performance issues, schedule delays, and fuel damage.
Foreign objects also increase the potential for debris induced fuel failure. Objects can be drawn up and onto fuel by the piston action of the fuel assembly entering and exiting the rack cell. This can occur during new fuel receipt, refueling activities, and during dry cask storage campaigns. Therefore, causing potential consequences for both the reactor and spent fuel pool activities.
Westinghouse’s remotely operated spent fuel pool under rack services mitigate these risks by characterizing and retrieving foreign objects before they can create challenges to plant safety.
Scarab IIIF Crawler

Foreign Object Retrieval

Cloth Wipes

Wire Trapped in Fuel Assembly

Broken Filter

Pre-Service

Post-Service
Westinghouse provides qualified personnel and equipment to deliver remote robotic spent fuel pool under rack service. The service will characterize and retrieve foreign object from the spent fuel pool under rack region. Foreign object will be retrieved using a site provided vacuum filtration system or retrieved using the remotely operated vehicle’s mechanical gripper. Objects retrieved using the gripper are placed in foreign object basket for disposal by site personnel.
Westinghouse employs a retrieve upon location approach to cleaning. Once a foreign object or debris is located, the team will record the data in the procedure, then vacuum or mechanically retrieve the material. This approach saves time, cost and reduces risk.
Retrieving upon location allows the team to close out service lanes without having to access the area multiple times.
There is a risk of foreign objects and debris being pushed into areas that are difficult to access as the crawler access service lanes. Our approach reduces this the risk, saves time, and ultimately cost.
The primary method for retrieving foreign objects from under the spent fuel pool under rack is vacuuming. The secondary method for retrieving foreign objects will be a mechanical gripper.
The service will use the Westinghouse Spent Fuel Pool Under Rack system. The system consists of the following components:
Control Console
The control console is a modular system designed to control the crawler and submersible pan, tilt, and zoom camera system, provides character generation for video overlay, captures digital images, and records service video.
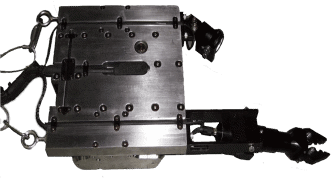
Spent Fuel Pool Under Rack Crawler
The under rack crawler is a low profile, submersible tracked remotely operated vehicle outfitted with a vacuum port and either a vacuum end effector or mechanical gripper. The service will use two (2) crawlers, one configured for vacuuming and one configured for mechanical retrieval operations. Both crawlers can be configured for either operation to provide a contingency in case of equipment failure. The crawlers are designed to vacuum debris and retrieve foreign objects.
Submersible Pan, Tilt, and Zoom (PTZ) Camera System
The system is a submersible pan, tilt, and zoom color video camera system with integrated lighting. The system is designed to perform pre and post service general area inspection of the spent fuel pool under rack, and to verify position of the crawler.










